Lab members (Prof. Chen, Dan and Hui) attended the DSCC (Dynamic Systems and Control Conference) at Park City, Utah, from October 8 – 11, 2019, and received the 2019 DSCC Robotics Technical Committee Best Student Paper Award.
Hui presented his work on “Following Fast-Dynamic Targets with only Slow and Delayed Visual Feedback — A Kalman Filter and Model-Based Prediction Approach,” and received the 2019 DSCC Robotics Technical Committee Best Student Paper Award. Congratulations!
- Paper information: Although visual feedback has enabled a wide range of robotic capabilities such as autonomous navigation and robotic surgery, low sampling rate and time delays of visual outputs continue to hinder real-time applications. When partial knowledge of the target dynamics is available, however, we show the potential of significant performance gain in vision-based target following. Specifically, we propose a new framework with Kalman filters and multirate model-based prediction (1) to reconstruct fast-sampled 3D target position and velocity data, and (2) to compensate the time delay for general robotic motion profiles.
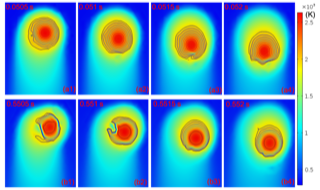
Dan exhibited her research on “Control-oriented Modeling and Repetitive Control in In-layer and Cross-layer Thermal Interactions in Selective Laser Sintering.” Way to go!
- Paper information: Although laser-based additive manufacturing (AM) has enabled unprecedented fabrication of complex parts directly from digital models, broader adoption of the technology remains challenged by insufficient reliability and in-process variations. In pursuit of assuring quality in the selective laser sintering (SLS) AM, this paper builds a modeling and control framework of the key thermodynamic interactions between the laser source and the materials to be processed.