Fast situational awareness and feedback control is a defining issue for converging autonomous robotic operations and the like. Autonomous onboard defense and underwater systems, for instance, must rapidly respond to potential high-speed threats in new age defense applications. While safety and performance requirements demand fast and provably safe system response to the extrinsic environment, perception sensors such as cameras and sonar are prohibitively slow for closing the autonomous control loop with environmental feedback. Failure to address this fundamental challenge obstructs the advancement of numerous autonomous mobile platforms such as underwater vehicles, self-driving cars, and human-safe collaborative robots. In pursuit of resolving this significant theoretical and application barrier, this research project targets to create new information feedback mechanisms for systematic fast controls under slow information feedback.
Vision-Based Control and Multibody Control Systems
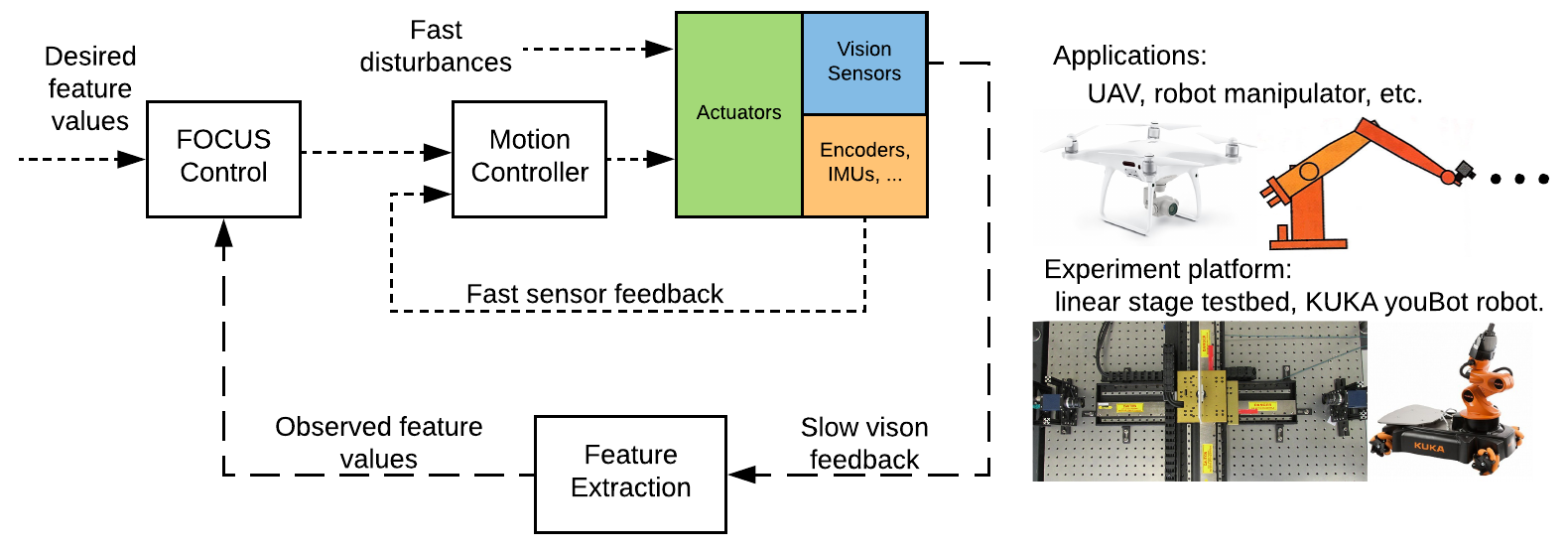
This research focuses on visible and infrared-vision-based tracking and regulation. With the converging trend of advanced automation and pervasive imaging sensing, fast closed-loop control with visual feedback will be pivotal in autonomous systems in civilian applications and the battlefield. The new design space enabled by our research allows for systematic controls actions to be applicable at frequencies beyond the conventional Nyquist limitation, leading to a potential of fundamental advance in speed and accuracy for vision-based automation.
MACS collaborative robot
ONLINE DYNAMIC DATA-DRIVEN INFORMATION RECOVERY
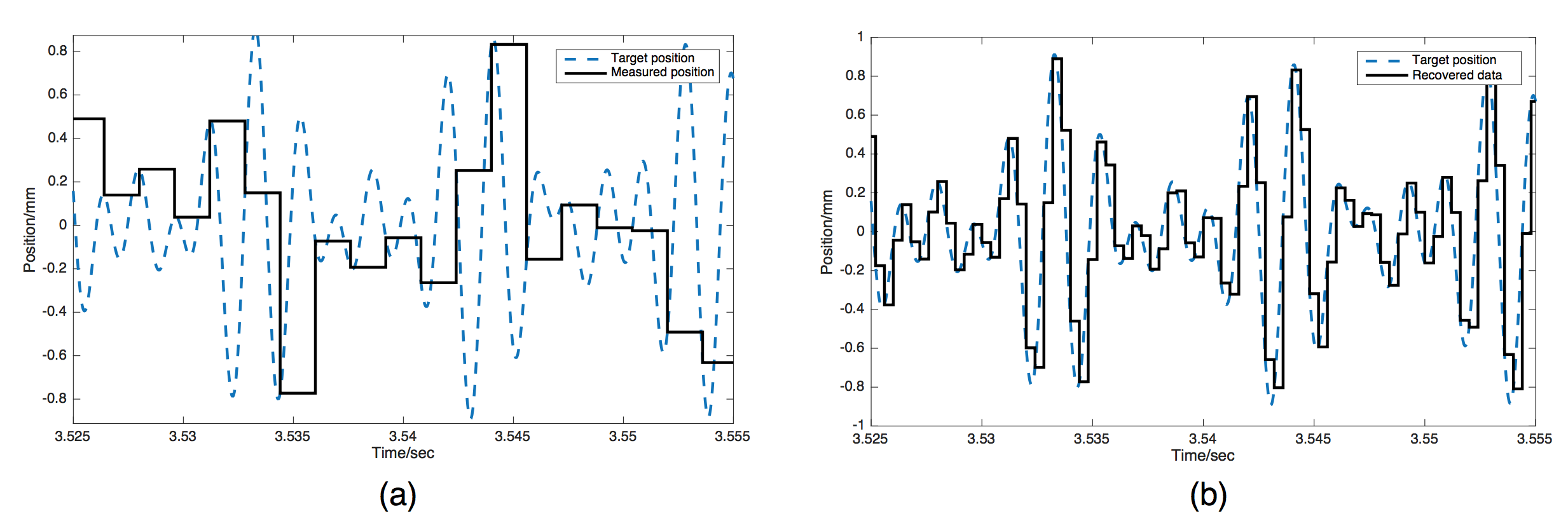
We are creating dynamic data-driven approaches to enable fast online control under sparse information feedback, with the goal of facilitating artificial intelligence that approximates human motion control capabilities in an information-sparse situation.
SPARSITY-AWARE FEEDBACK CONTROLS
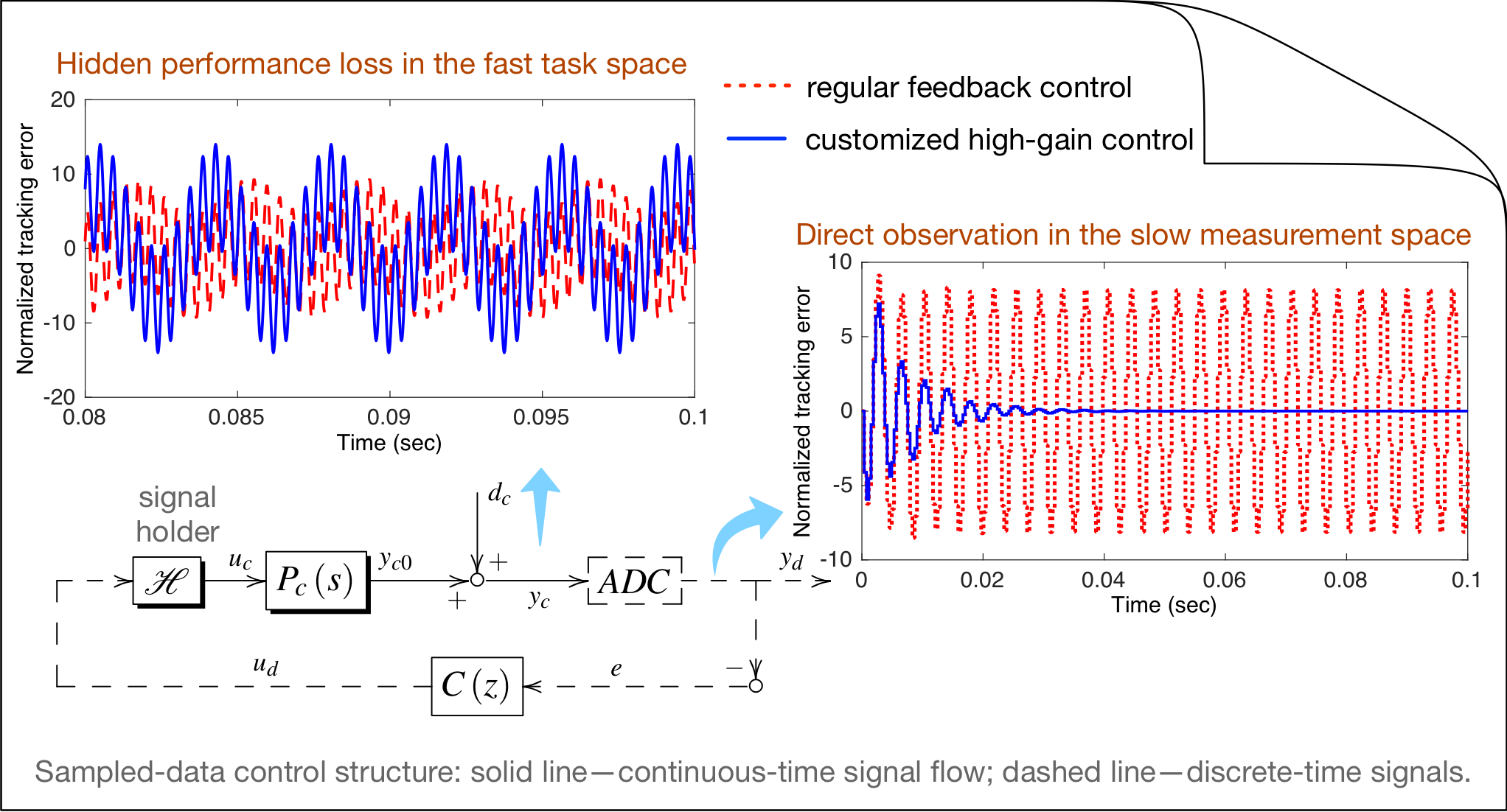
We are formulating control approaches for sparsity-aware tracking and regulation targeting at high-performance controls with closed-loop bandwidths that are orders of magnitude higher than dictations from sensor specifications.