A signature capability of humans and intelligent systems, adaptation has been not only a frequent scientific inquiry but also a central pillar in feedback controls. Adaptive control and system identification are central for understanding system models and high-performance control in unknown and/or time-varying control environments. While local convergence in stochastic adaptive control has been the norm and flexible adaptation to combined fast and slow time-varying dynamics is difficult with limited computation power, we achieved to show that efficient minimum-parameter adaptation can remedy such challenges. The result is a class of stability-assured adaptive controls that achieve highly robust feedback performance under unknown and/or extremely time-varying disturbances.
Active vibration control
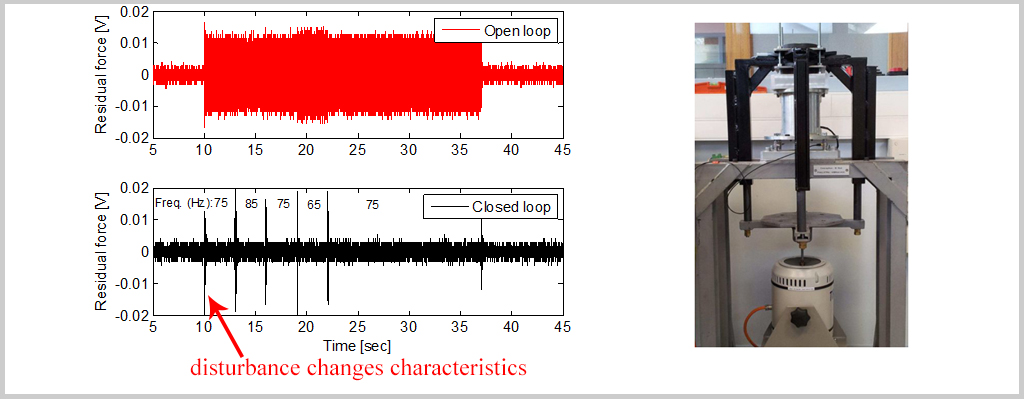
The following are examples of our achieved results for time-varying vibration identification and rejection in an active suspension system.
Single-frequency tracking:
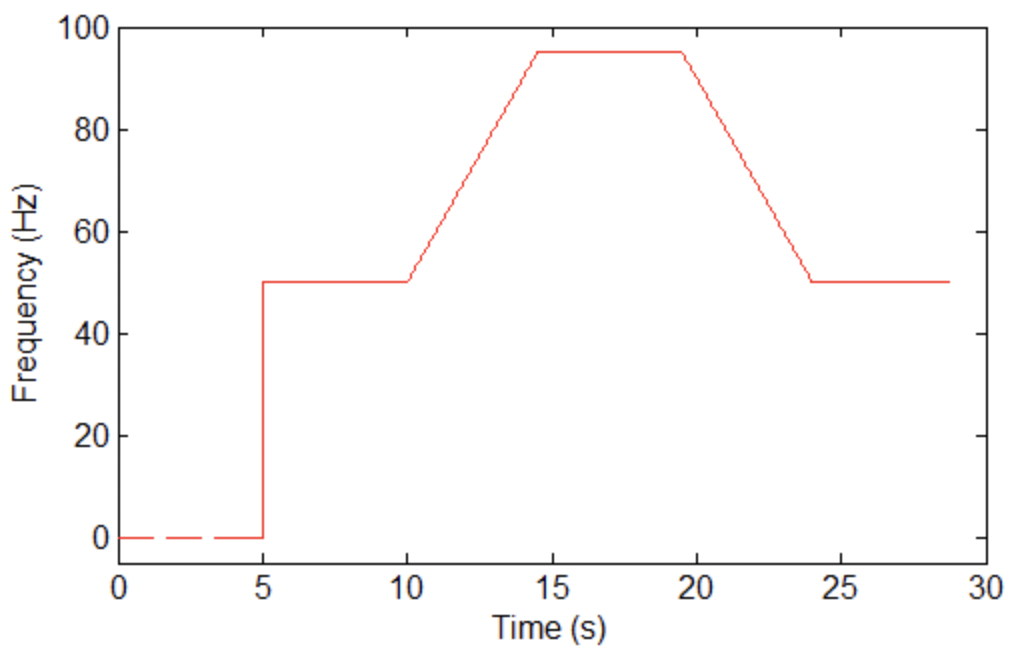
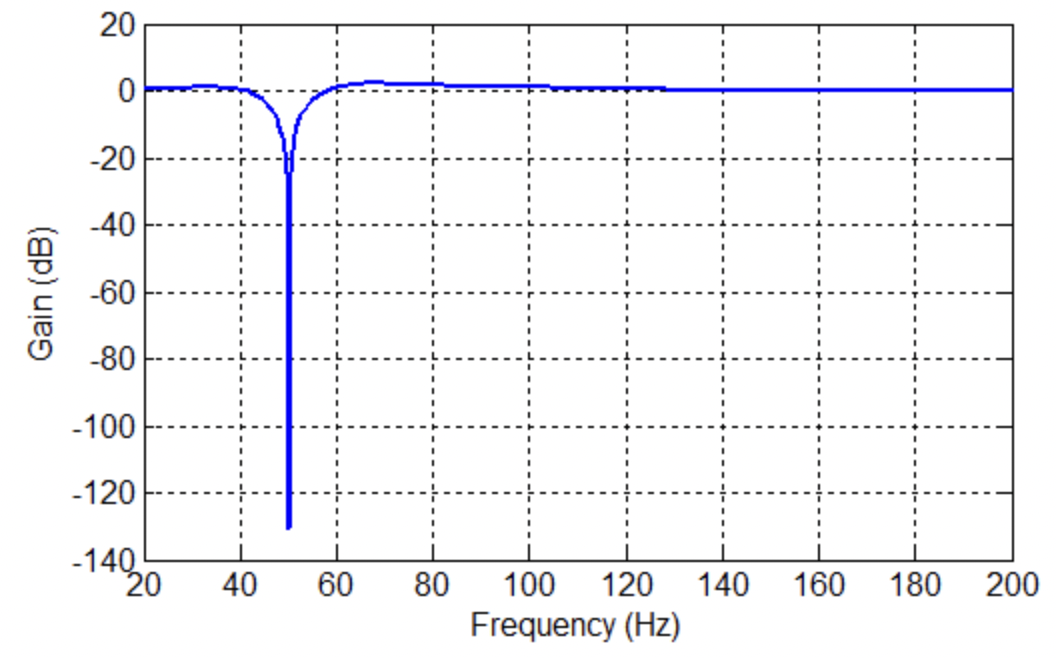
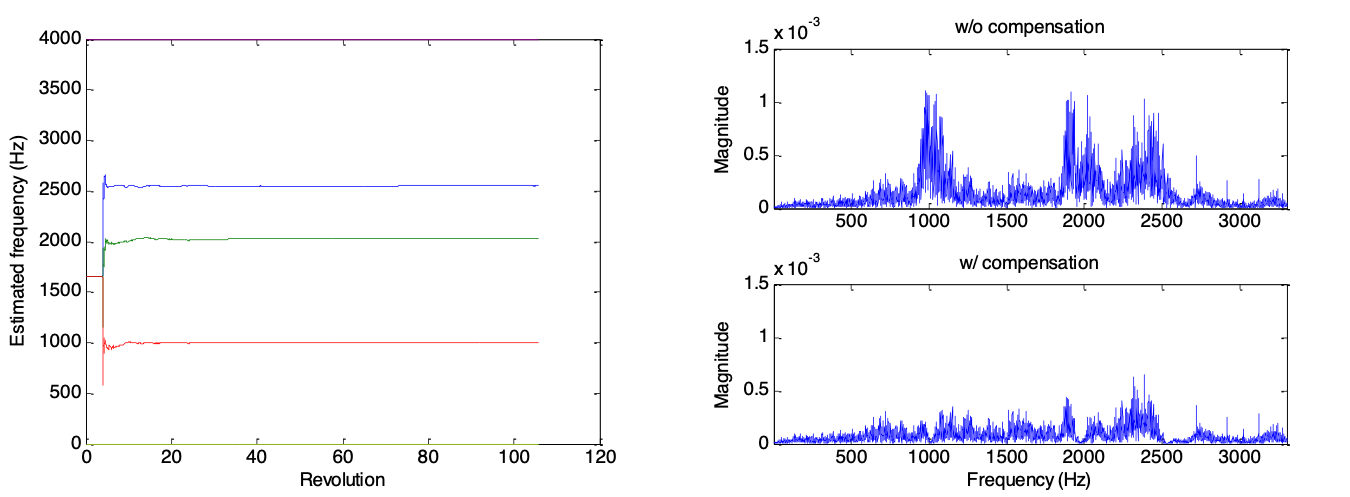
Multiple narrow-band disturbances (with abrupt frequency changes) identification and adaptive rejection:
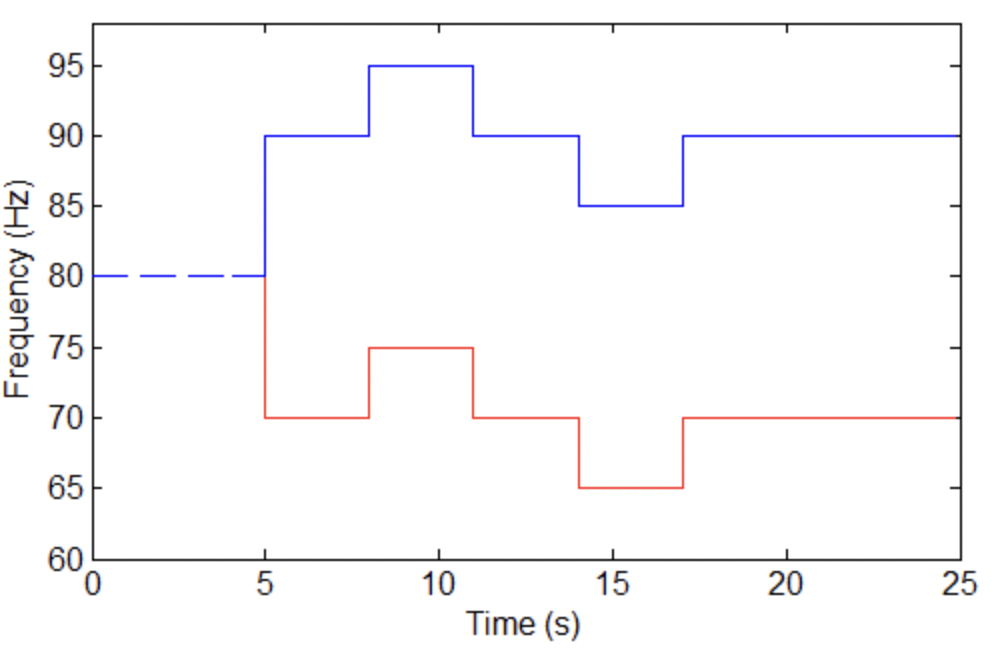
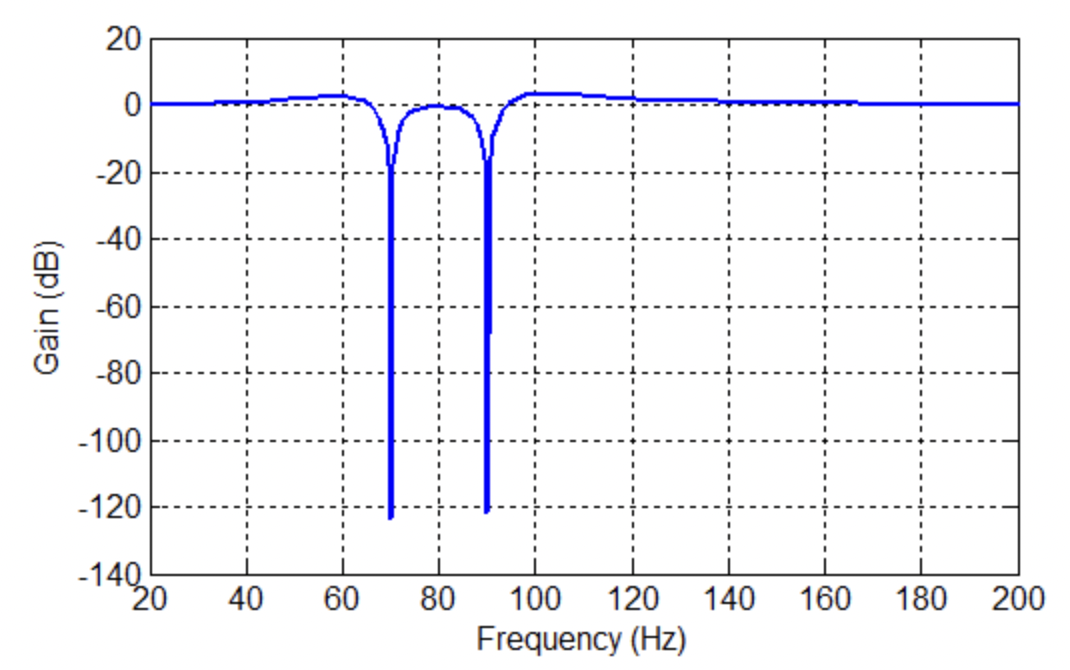
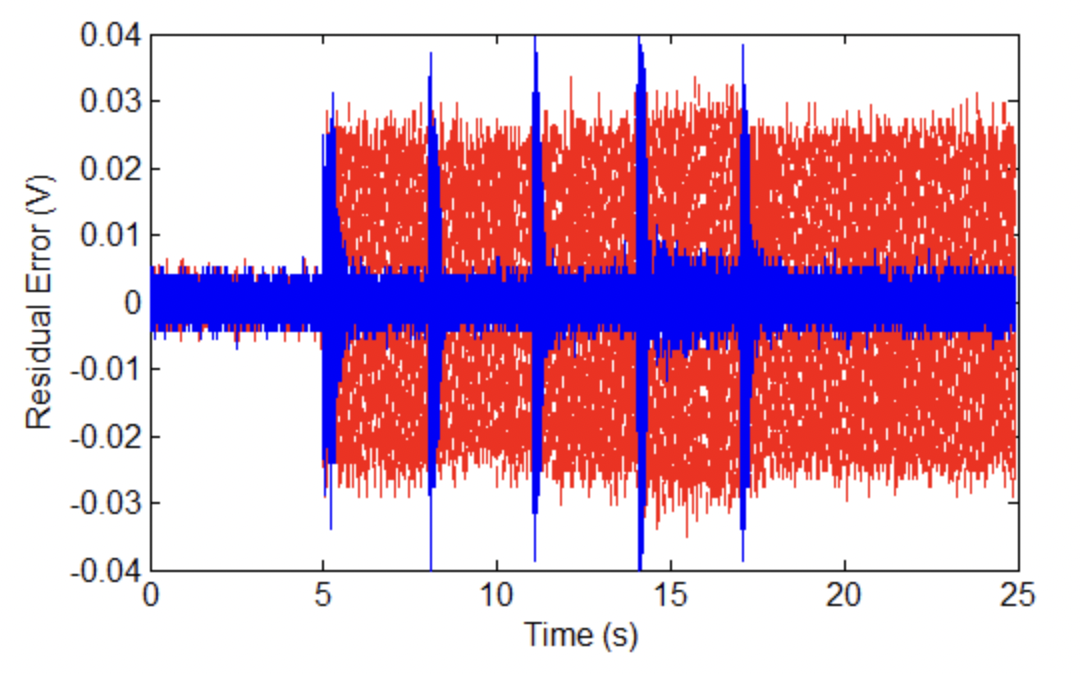
Detailed time- and frequency-domain performances are here.
{kind=link}
Interested readers can read more about the active suspension benchmark problem from the benchmark website, the summary slides, and summary paper. The benchmark was organized by Professor Ioan D. Landau in GIPSA-Lab at Grenoble (France) and was supported by the European Control Association. Results from the benchmark were published in a special issue of European Journal of Controls in 2013 and in an invited session at the 2013 European Control Conference. Different algorithms were compared in various evaluation metrics including performance, robustness, complexity, etc.
Hard disk drives (Past Project)
Adaptive compensation for multiple narrow-band disturbances
Narrow-band disturbances show up as spikes in the spectrum of the position error signal (PES). In HDD systems, sources of the narrow-band disturbances include track eccentricity (or repeatable runout), disk modes, and external vibrations. Since the frequencies of the narrow-band disturbances are often unknown, adaptive control is key for effective rejection of the disturbances. We have designed indirect and direct adaptive control schemes that compensate for single and multiple narrow-band disturbances with minimum-parameter adaptation to drastically improve the servo performance in track following.
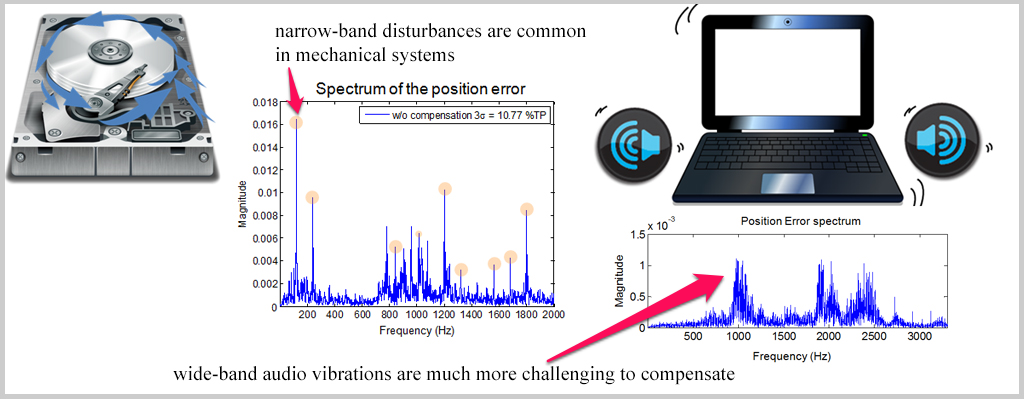
Adaptive audio-vibration rejection
With the ever-increasing demand for HDD applications in multimedia environments, external vibrations generated from sounds and environments are becoming the dominating sources of Track Mis-registration (TMR) in various HDD products. These audio vibrations from, e.g., the computer/TV speakers and dynamic vibrations in compact enclosures in data centers, contaminate the HDD servo performance by introducing strong and wide peaks to the PES spectrum. Such band-limited disturbances differ in products and can additionally be time dependent. In contrast to conventional narrow-band disturbances, the induced vibrations are wide in the spectrum and occur at very high frequencies. These characteristics make audio vibrations a significant challenge in high-speed high-performance controls.